温岭市华鑫机械制造有限公司位于浙江东部沿海——温岭市新河镇上莫工业区。公司成立于1991年,主要生产SUV、ATV、UTV、全时、分时、适时、四驱独立悬挂式驱动前、后桥总成,分动箱总成,后置式变速驱动后桥总成,电动汽车减速器、变速器、差速器总成,各种机械自锁,电子、电控差速锁总成,差速器壳体、半轴齿轮、行星齿轮(工艺为冷挤压、温挤压和热精锻)、蜗轮蜗杆、花键轴、高精度齿轮、MT、AT变速箱零部件以及其他机械零部件。



01:公司成立于1991年,总投资达5亿多;
02:从2000年开始我司投入大量的设备进入了汽车行业,与国内外汽车厂、全地形车厂、变速箱厂、车桥厂配套;
03:现有员工280余名,设有研发中心,高级工程师有4名,高级技师有20名;
04:拥有了一套科学的管理系统和先进的机械加工设备,还有完善的检测手段和检测设备并通过IATF16949认证。
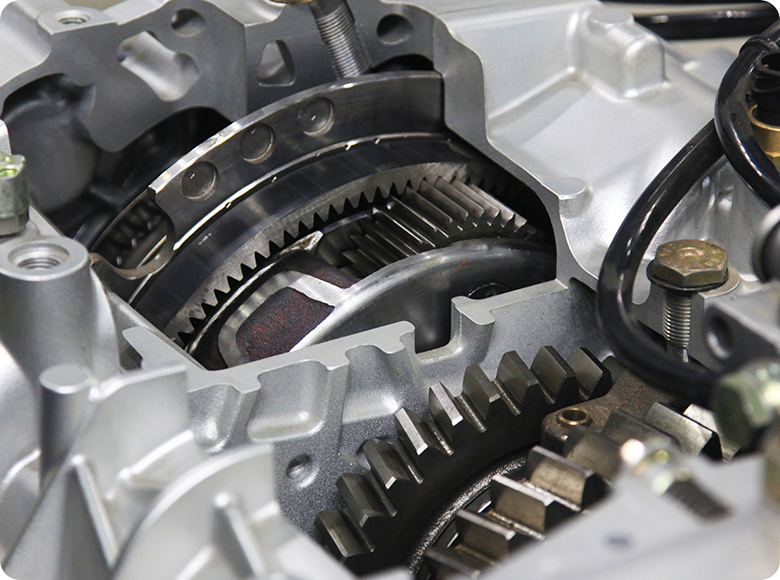
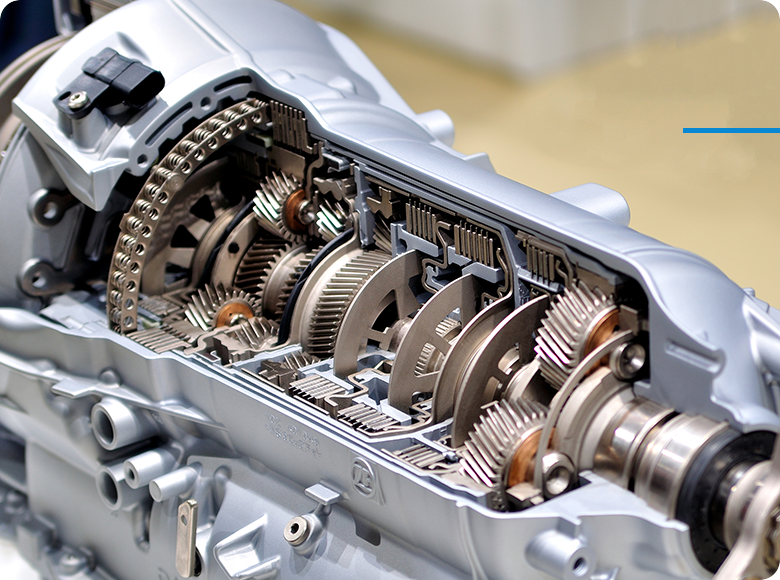
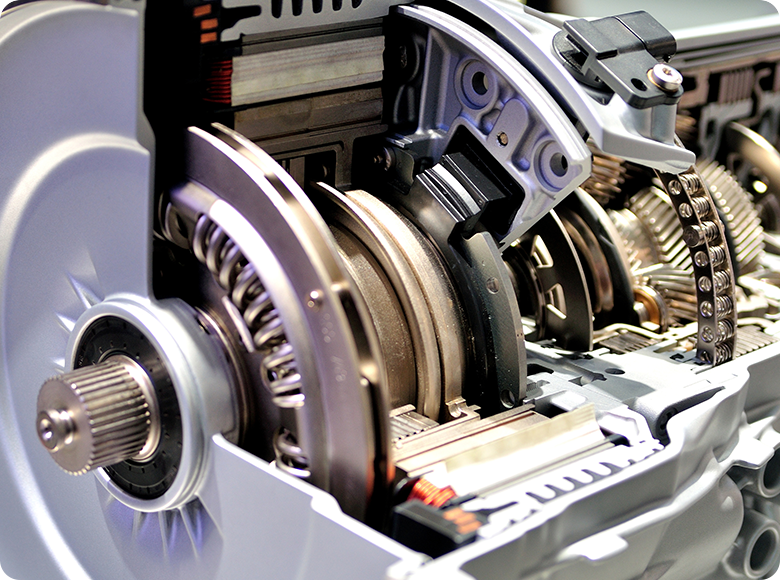
01:生产SUV、ATV、UTV、全时、分时、适时、四驱独立悬挂式驱动前、后桥总成;
02:生产分动箱总成、后置式变速驱动后桥总成、电动汽车减速器、变速器、差速器总成,各种机械自锁;
03:生产电子、电控差速锁总成,差速器壳体、半轴齿轮、行星齿轮;
04:生产蜗轮蜗杆、花键轴、高精度齿轮、MT、AT变速箱零部件等。
01:精心打造一支专业贴心的售后服务团队,耐心听取客户诉求并及时作出响应;
02:灵活调度和迅速解决问题是华鑫机械与客户密切合作的基础;
03:华鑫机械不断改善产品体系和服务流程,超出客户期望;